VisDrone团队主要面向低空智能开展大规模低空数据平台构建、低空感知技术攻关以及典型低空应用,构建了世界上规模最大无人机视觉开放数据平台,包含超过2000万目标标注和2000万图像/视频帧。团队负责人朱鹏飞,教授,博士生导师,国家优青和天津市杰青获得者。研究方向为智能无人机,已发表IEEE TPAMI、IJCV、CVPR、ICCV等CCF A类和IEEE 汇刊论文80余篇,获吴文俊人工智能科技进步一等奖等奖励。主持国家自然科学基金重点项目和新一代人工智能重大项目等10余项,与中汽研、长安汽车、航天三院、中水北方和国家电网等企业和研究机构合作,开发了自动驾驶自动标注平台、智能无人机巡检平台等,推进技术落地和成果转化。

目前正在组建低空智能团队,欢迎大模型、智能无人机和多智能体学习相关研究方向同行者加入,感兴趣的可发简历到邮箱[email protected]。
算力资源:目前百卡计算集群,同时从AutoDL购买了在线算力作为缓冲算力资源池。
数据资源:构建了世界上规模最大的低空无人机视觉数据平台,包含超过2000万图像/视频帧以及2000万目标标注,拥有相对独立的赛道,保障同学们能够轻松卷赢。
大模型:依托自有的海量无人机视觉数据和各方算力支持,团队自研了低空无人机视觉基座模型并在不断迭代更新,敬请关注!
@article{cao2024visible,
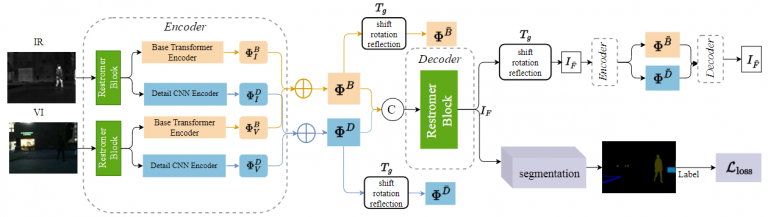
title={Visible and Clear: Finding Tiny Objects in Difference Map},
author={Cao, Bing and Yao, Haiyu and Zhu, Pengfei and Hu, Qinghua},
journal={arXiv preprint arXiv:2405.11276},
year={2024}
}
<pre>
@ARTICLE{Gao22LUSS,
author={Gao, Shanghua and Li, Zhong-Yu and Yang, Ming-Hsuan and Cheng, Ming-Ming and Han, Junwei and Torr, Philip},
title={Large-scale Unsupervised Semantic Segmentation},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2023},
volume={45},
number={6},
pages={7457-7476},
doi={10.1109/TPAMI.2022.3218275}
}
</pre>