


智能无人系统环境感知性能依赖于大规模高质量标注数据,但标注成本高昂并且耗时耗力,同时海量的无标注数据信息也未被充分挖掘和利用。围绕环境感知中的目标检测、目标计数、语义分割等任务,研究基于海量未标注数据的大模型以及大小模型的协同学习。
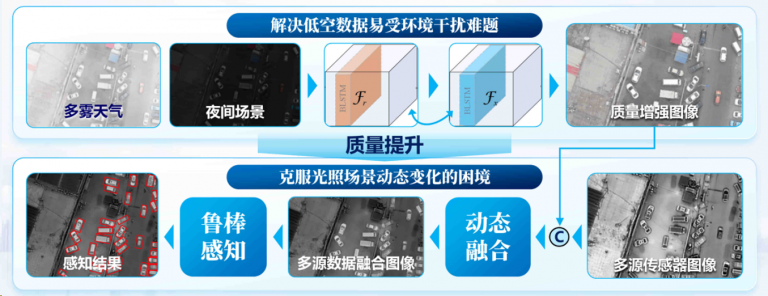
无人机通过其搭载的多种类型传感器实现对环境的数据采集,如何实现多传感器数据的实时动态配准和融合,是低空智能感知亟需攻克的关键难题。围绕可见光和热红外成像,研究多传感器配准-融合-感知一体化框架以及新一代双光相机,以实现无人机高速飞行状态下的实时鲁棒感知。
单个智能无人系统由于视角和模型能力的约束,在复杂环境下无法对环境进行高性能的感知,而多个智能无人系统载体可以通过协同学习,利用多个来源多个视角的互补信息,提高智能无人系统环境感知的精确度和鲁棒性,实现“互帮互助共同成长”。
@article{cao2024visible,
title={Visible and Clear: Finding Tiny Objects in Difference Map},
author={Cao, Bing and Yao, Haiyu and Zhu, Pengfei and Hu, Qinghua},
journal={arXiv preprint arXiv:2405.11276},
year={2024}
}
<pre>
@ARTICLE{Gao22LUSS,
author={Gao, Shanghua and Li, Zhong-Yu and Yang, Ming-Hsuan and Cheng, Ming-Ming and Han, Junwei and Torr, Philip},
title={Large-scale Unsupervised Semantic Segmentation},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2023},
volume={45},
number={6},
pages={7457-7476},
doi={10.1109/TPAMI.2022.3218275}
}
</pre>