论文题目:Socialized Learning: Making Each Other Better Through Multi-Agent Collaboration
作者:姚鑫杰(博士研究生),王煜,朱鹏飞,林婉瑜,李佳璐,李维浩,胡清华
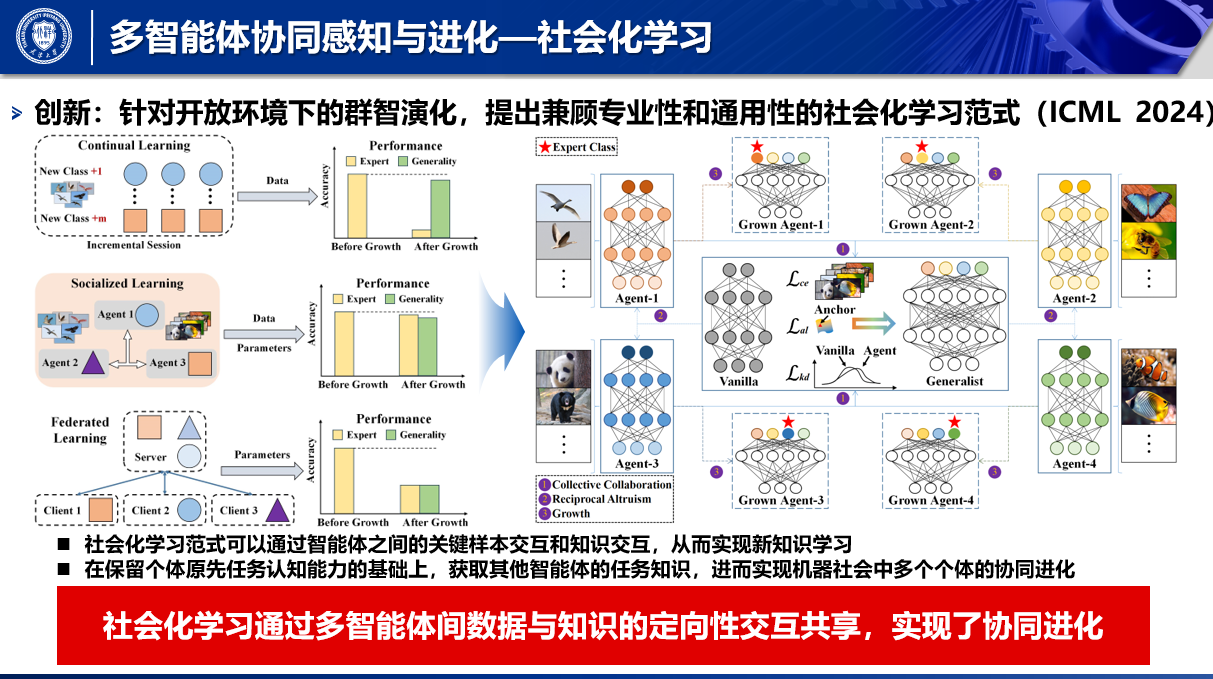
论文概述:近期,团队提出了一个多智能体协同感知的社会化学习框架,已被2024国际机器学习大会(ICML)录用。在开放环境下,智能体往往需要连续学习新知识。当前连续/增量学习方法往往仅关注单一智能体如何从充分的数据中学习,但人类的连续学习过程往往通过与掌握相关知识的其他个体进行交流,学习有限样本即可实现。针对此问题,团队提出了一类社会化学习范式,不同智能体通过分享从数据中学习到的知识,实现新知识学习。同时,不同于联邦学习,社会化学习范式可以通过智能体之间的关键样本交互和知识交互,在保留个体原先任务认知能力的基础上,获取其他智能体的任务知识,进而实现机器社会中多个个体的协同进化。