
Evaluation
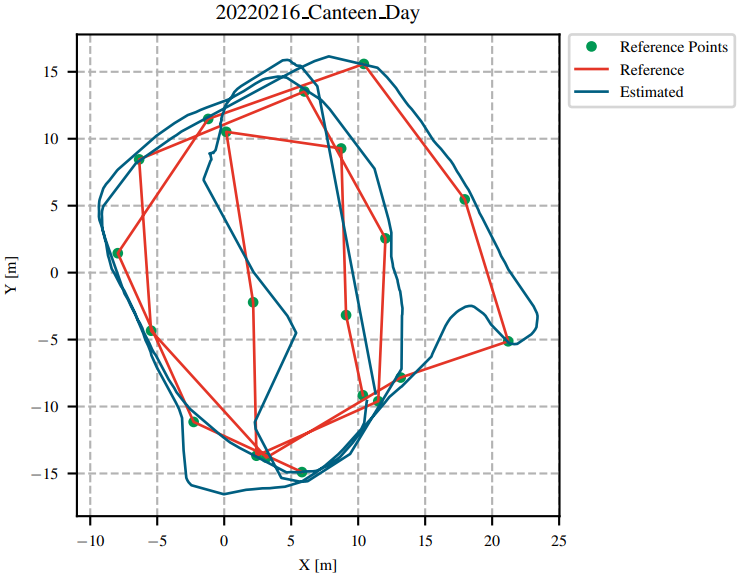
- The submission will be ranked based on the completeness and frequency of the trajectory as well as on the position accuracy (ATE). The score is based on the ATE of individual points on the trajectory. Points with the error smaller than a distance threshold are added to your final score. This evaluation scheme is inspired by HILTI Challenge.
- Output trajectories should be transformed into the body_imu frame, We will align the trajectory with the dense ground truth points using a rigid transformation. Then the Absolute Trajectory Error (ATE) of a set of discrete point is computed. At each ground truth point, extra penalty points are added to the final score depending on the amount of error at this point:
| Error | Score(points) |
| <=5cm | 10 |
| <=30cm | 6 |
| <=50cm | 3 |
| <=100cm | 1 |
| >100cm | 0 |
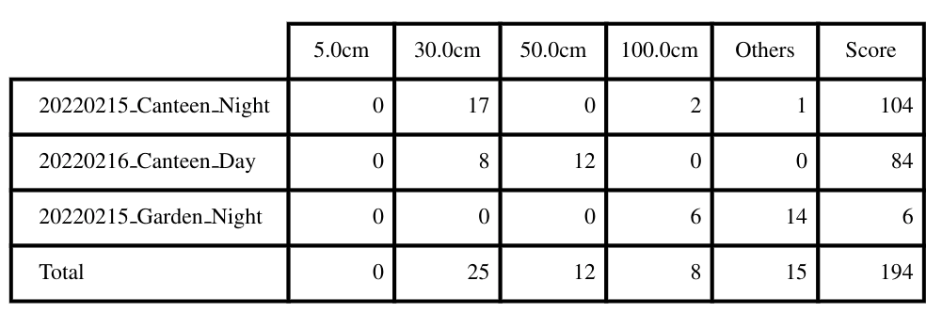
- Each sequence will be evaluated over a maximum of 200 points, which leads to a maximum of N×200 points being evaluated among N sequences.
Given an example:
Submission Guidelines
Trajectory Results
- Please upload a .zip file consisting of a list of text files named as the sequence name shown as follows:
- Warning:The first level of the zip file is only the traj folder, and inside the folder is a list of text files.
traj
--- 20220215_canteen_night.txt
--- 20220215_garden_night.txt
--- 20220219_MCR_slow_00.txt
--- 20220226_campus_road_day.txt
--- ....- The text files should have the following content:
1644928761.036623716 0.0 0.0 0.0 0.0 0.0 0.0 1.0
....- Each row contains timestamp_s tx ty tz qx qy qz qw. The timestamps are in the unit of second which are used to establish temporal correspondences with the groundtruth. The first pose should be no later than the starting time specified above, and only poses after the starting time will be used for evaluation.
- The poses should specify the poses of the body IMU in the world frame. If the estimated poses are in the frame of other sensors, one should transform these poses into the world frame of the body IMU as
T_bodyw_body = T_body_sensor * T_sensorw_sensor * T_body_sensor^(-1);.
- The poses should specify the poses of the body IMU in the world frame. If the estimated poses are in the frame of other sensors, one should transform these poses into the world frame of the body IMU as
Do not publicly release your trajectory estimates, as we might re-use some of the datasets for future competitions.
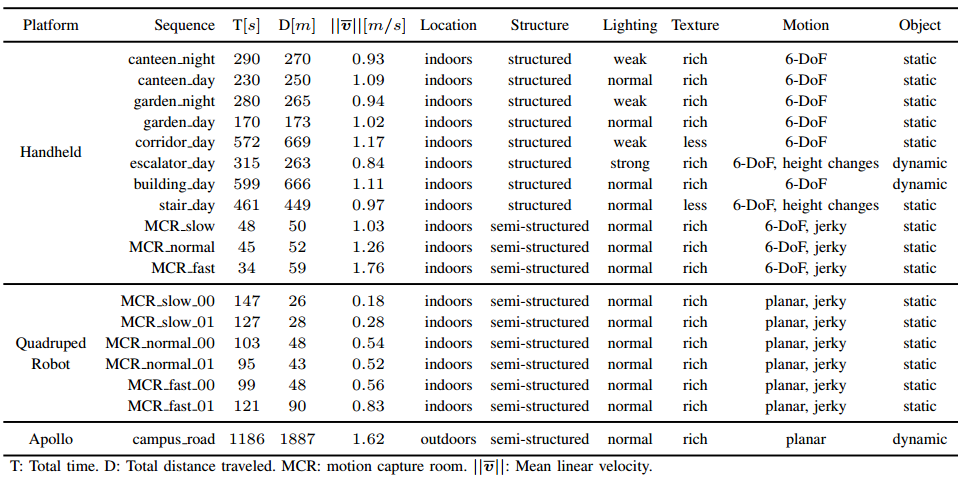
Sequence
- Detailed statistics are shown:
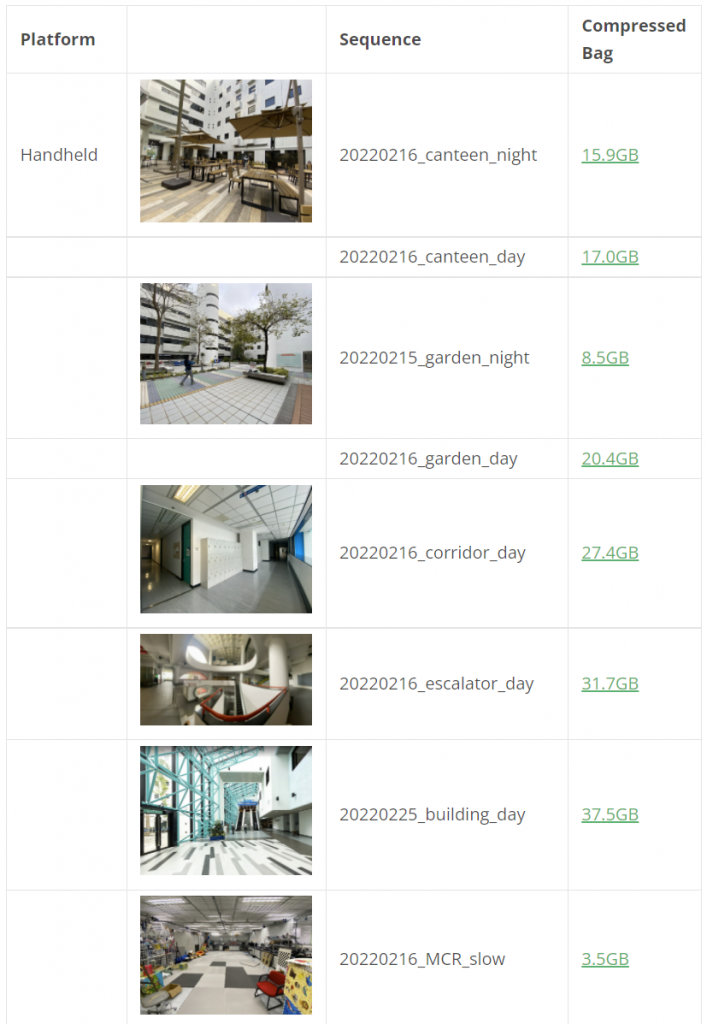
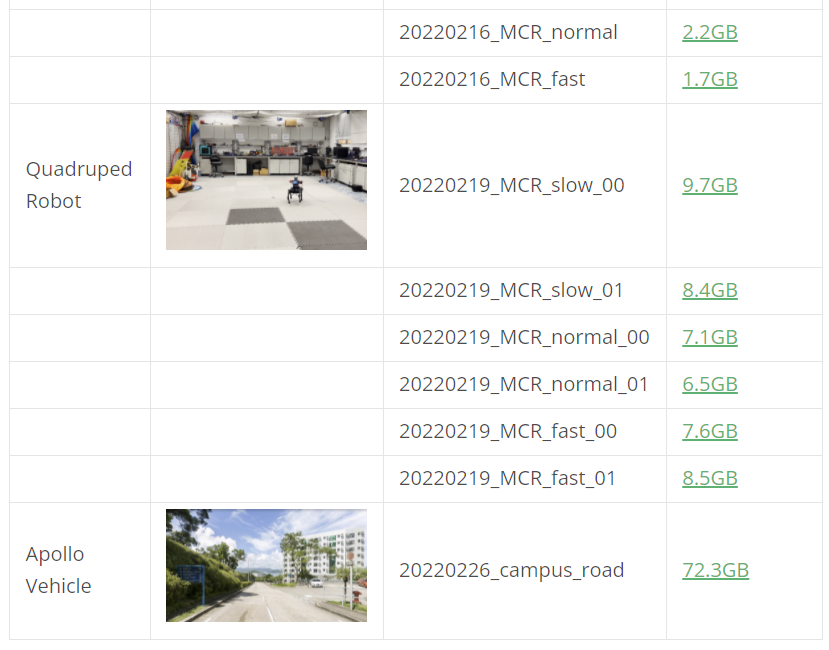
- Download link can be found here
FAQ
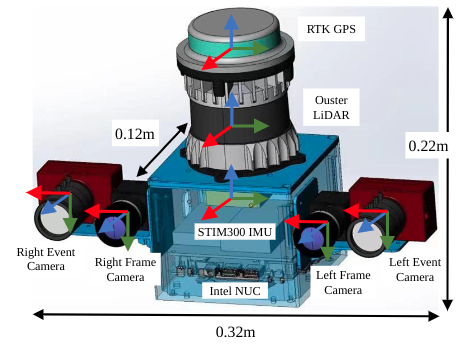
- How are the frames defined on the sensor setup?
The picture below is a schematic illustration of the reference frames (red = x, green = y, blue = z):
- How are the results scored?
The results submitted by each team will be scored based on the completeness and ATE accuracy of the trajectories. All the results will be displayed in the live leaderboard. Each trajectory will be scored based on the standard evaluation points, the accumulation of the scores of all these evaluation points is normalized to 100 points to get the final score of the sequence. Each evaluation point can get 0-10 points according to its accuracy.
- Will the organizer provide the calibration datasets of the IMU and camera?
Of course, we will provide the calibration data of IMU and cameras.
- Is the ground truth available?
We will provide some sample datasets along with their ground truth collected with the same sensor kit, but the ground truth for the challenge sequences is not available. However, you can submit your own results in the website evaluation system for evaluation.
Reference
[1] Jianhao Jiao, Hexiang Wei, Tianshuai Hu, Xiangcheng Hu, etc., Lujia Wang, Ming Liu, FusionPortable: A Multi-Sensor Campus-Scene Dataset for Evaluation of Localization and Mapping Accuracy on Diverse Platforms, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, Kyoto, Japan.
[2] HILTI Challenge.